


Magna tal-Ħadid tal-Issaldjar Awtomatizzata bi 3 Assi b'Alimentatriċi tal-Issaldjar tal-Wajer tal-Landa

Dettall tal-ProdottKaratteristiċi tal-prodott
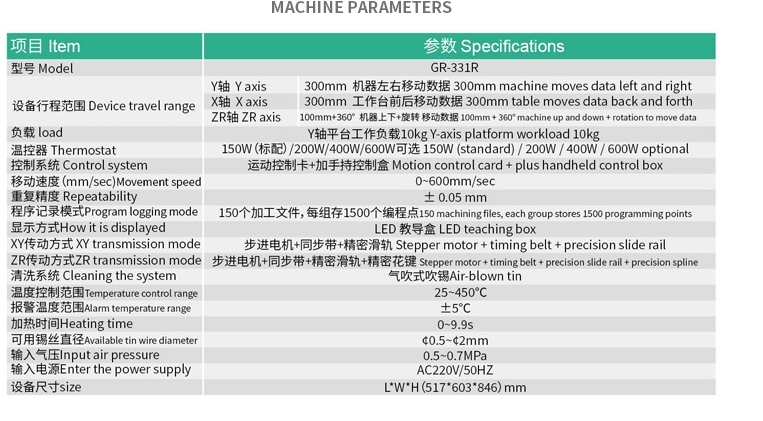
1. Mudell tal-prodott: GR-331R;
2. Metodi ta' issaldjar flessibbli u diversi, b'funzjonijiet bħal iwweldjar fuq il-post, iwweldjar bil-ġibda (iwweldjar bil-ġbid), eċċ.
3. L-apparat jista' jaħżen 150 fajl tal-ipproċessar, b'kull grupp jaħżen 1500 punt ta' programmar;
4. Funzjoni ta' jitter tal-istann, il-ftuħ ta' din il-funzjoni waqt l-iwweldjar jista' jagħmel l-iwweldjar aktar mgħaġġel, speċjalment effettiv għal ġonot kbar tal-istann;
5. It-trajettorja tal-issaldjar hija viżibbli, u b'hekk ikun konvenjenti għall-operaturi biex jifhmu l-progress tal-issaldjar u għall-persunal tal-inġinerija biex jiddebuggja;
6. L-editjar tal-programm jista' jiġi kkupjat minn punt għal punt u minn blokk għal blokk, u b'hekk jitnaqqas il-ħin tal-kitba tal-programm u jsir sempliċi u faċli biex titgħallmu;
7. It-tagħmir għandu funzjoni ta' tindif awtomatiku, li tiżgura b'mod effettiv il-kwalità tal-ipproċessar tal-istann u testendi l-ħajja tas-servizz tal-ponta tal-ħadid tal-issaldjar;
8. Id-dirgħajn robotiċi b'konnessjoni b'ħafna assi huma kollha mmexxija minn muturi stepper ta' preċiżjoni u algoritmi avvanzati ta' kontroll tal-moviment, li jtejbu b'mod effettiv il-preċiżjoni u r-ripetibbiltà tal-pożizzjonament tal-moviment.
9. Noffru disinn robotiku tal-ponta tal-ħadid, personalizzat u produzzjoni skont il-proġett tal-klijent.
Kategoriji ta' prodotti
-

Żewġ Ħdejjed tal-Isaldjar, Żewġ Termostati, Tagħmir Industrijali...
-

Magna tal-issaldjar tal-batterija tal-litju b'rotazzjoni ta' 360...
-

Magna tat-Tħaffir Awtomatika Ekoloġika b'Effiċjenza Għolja...
-

Magni tal-issaldjar b'viżjoni doppja Wajer SI641R mibjugħ...
-

Magni tal-Isaldjar Aħdar ta' Preċiżjoni Għolja Awtomatika...
-

Magna Awtomatika tal-Issaldjar tal-Wajer b'Żewġ Punti tax-Xogħol...





